TSNE降维
基本概念
t-SNE(t-distributed stochastic neighbor embedding)是用于降维的一种机器学习算法,由 Laurens van der Maaten 等在08年提出。
t-SNE 是一种非线性降维算法,非常适用于高维数据降维到2维或者3维,进行可视化。该算法可以将对于较大相似度的点,t分布在低维空间中的距离需要稍小一点;而对于低相似度的点,t分布在低维空间中的距离需要更远。
tips1:TSNE将数据点之间的相似性转换为联合概率,并试图最小化低维嵌入和高维数据的联合概率之间的Kullback-Leibler差异。t-SNE的成本函数不是凸的,即使用不同的初始化,我们可以获得不同的结果。
tips2:如果特征数量非常多,强烈建议使用另一种降维方法(例如,对于密集数据使用PCA或对于稀疏数据使用TruncatedSVD)将尺寸数量减少到合理的数量(例如50个)。这将抑制一些噪声并加快样本之间成对距离的计算。
tips3:sklearn TSNE 源码
优缺点
优点:
- 对于不相似的点,用一个较小的距离产生较大的梯度来排斥区分。
- 这种排斥不会无限大(梯度中分母),避免不相似的点距离太远。
缺点:
- 主要用于可视化,很难用于其他目的。比如测试集合降维,因为他没有显式的预估部分,不能在测试集合直接降维;比如降维到10维,因为t分布偏重长尾,1个自由度的t分布很难保存好局部特征,可能需要设置成更高的自由度。
- t-SNE倾向于保存局部特征,对于本征维数(intrinsic dimensionality)本身就很高的数据集,是不可能完整的映射到2-3维的空间(映射存在信息损失)
- t-SNE没有唯一最优解,且没有预估部分。如果想要做预估,可以考虑降维之后,再构建一个回归方程之类的模型去做。但是要注意,t-sne中距离本身是没有意义,都是概率分布问题。
- 训练太慢。有很多基于树的算法在t-sne上做一些改进
算法流程
- 首先在高维空间,将样本之间的距离转换成概率分布.
$$ P_{j|i}=\frac {exp(-||x_i-x_j||^2/2\sigma^2)}{\sum_{k \neq i} exp(-||x_i-x_k||^2/2\sigma^2)} $$
- 在低维空间寻找类似的概率分布,并使用KL散度衡量高维空间/低维空间两概率分布的相似度.
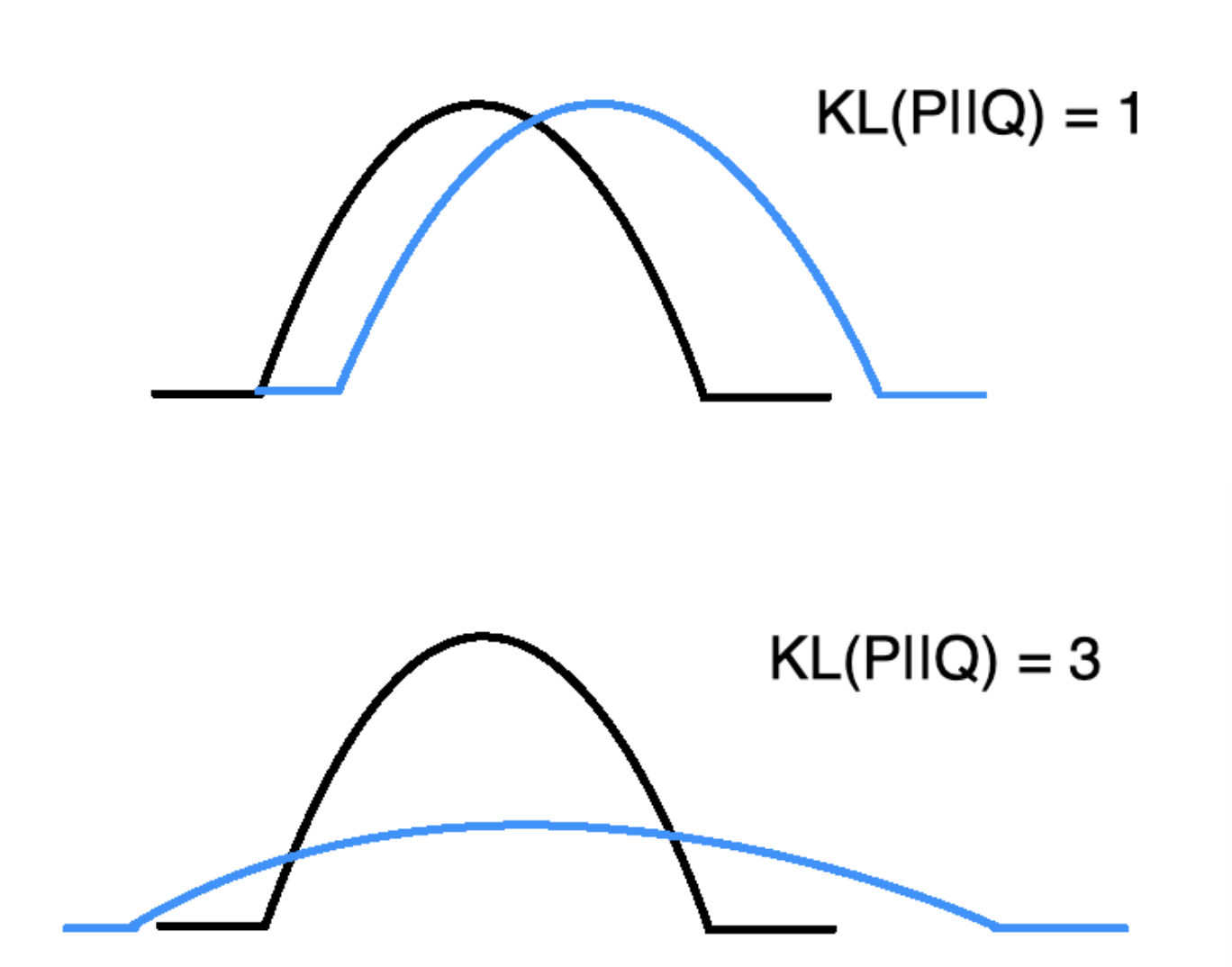
使用梯度下降最小化所有数据点上的KL散度总和
$$ C = \sum_i KL(P_i||Q_i)=\sum_i \sum_j p_{j|i} \log {\frac {p_{j|i}}{q_{j|i}} } $$
- 对 C 求偏导数(每个样本)获得每次更新的方向
sklearn
n_components: tsne最终降维的维度init: 初始化方法,可以使用pcaorrandom
from sklearn.manifold import TSNE
tsne=TSNE(n_components=1,init='pca', random_state=501)
down_X = tsne.fit_transform(X) # train and get embadding
