最近写的一个Multi-task框架~
项目地址:https://github.com/JJJYmmm/Pix2SeqV2-Pytorch
Simple PyTorch implementation of Pix2SeqV2. This project references moein-shariatnia's Pix2Seq and the paper A Unified Sequence Interface for Vision Tasks.
Introduction
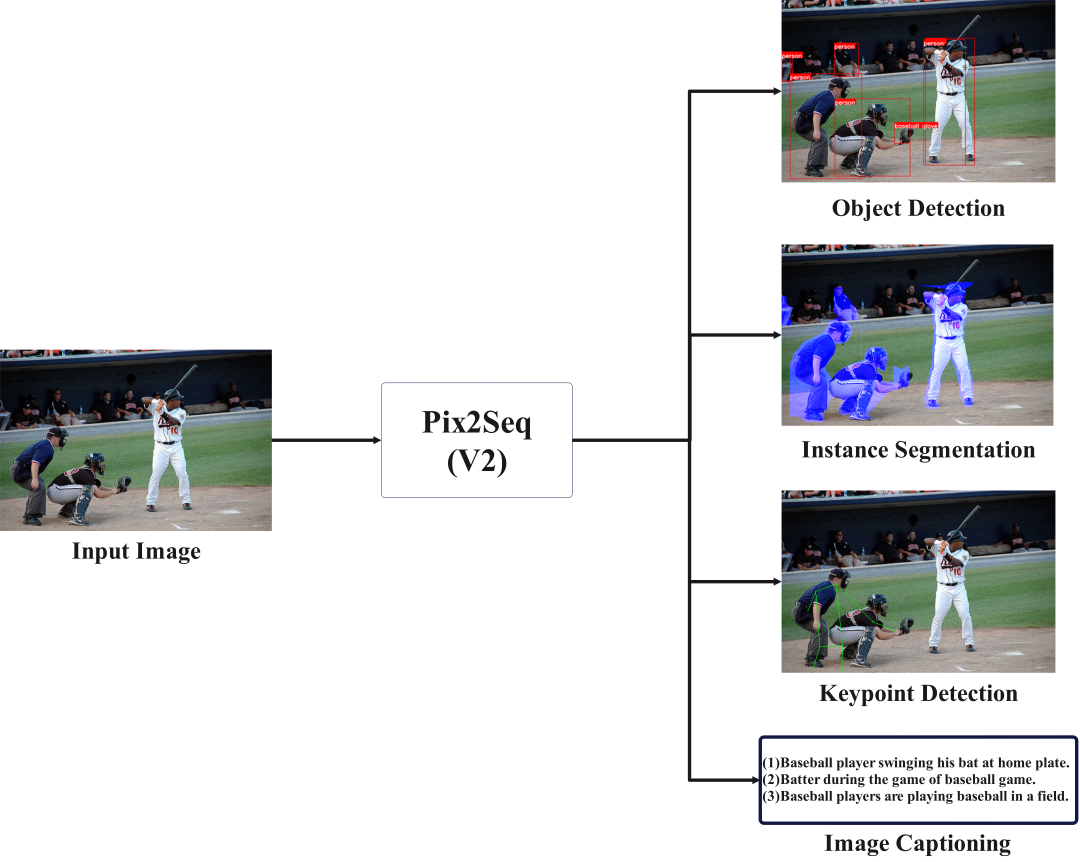
Pix2Seq is a generalized framework for solving visual tasks proposed by Google. Essentially it treats visual tasks as language tasks, generating sequences of tokens by auto-regression, and obtaining the output of many visual tasks(e.g., object detection, segmentation, captioning, keypoint, etc.) by decoding the tokens.
The official implementation of Pix2Seq google-research/pix2seq: Pix2Seq codebase is written in TensorFlow. I wish there was a PyTorch implementation. Then Shariatnia gave me a simple implementation of Pix2SeqV1(just for object detection, no multi-task training). I followed his project and added something new below:
- For objection detection, add support for COCO2017 datasets.
- Keep the network structure unchanged and add interfaces for more tasks(instance segmentation, image captioning and keypoint detection).
- Add support for multi-task training.
Something notes:
- This project is just a simple implementation in PyTorch, I only referred to the original paper for other tasks' interface, please refer to the official implementation for more details.
- Since this is a practice project, I only used one GPU of RTX 3090ti for training and reasoning. The main purpose of this project is to verify the feasibility of multi-task training, so I don't have more performance requirements.
- If you want to improve the performance, just try to 1)add more data augmentations, 2)train for more epochs and 3)replace the model with a larger number of params, etc.
If you have more questions about this project, feel free to issues and PRs!
Environment
I use anaconda to manage my python environment. You can clone my environment by doing this:
# change to root dir
cd Pix2SeqV2
# create a new python 3.8 env
conda create -n your_env_name python=3.8
# install essential packages
pip install -r ./requirements.txt
If you want to run the project, you need to have at least one GPU with more than 12G memory. Of course, the more GPUs the better!
I haven't written the code for multi-GPU training, but it's coming soon.
Configurations
All configurations can be modified in CFG class in Pix2SeqV2/config.py. Most of my training configurations come from Shariatnia's tutorials.
I use relative paths for other configs like weights and other required files. The only thing you need to change is the path of the dataset.
To fetch VOC dataset, just cd download and bash download_voc.sh
To fetch COCO2017 dataset, download here
# For VOC dataset, you need to change the following two var
img_path = '../download/VOCdevkit/VOC2012/JPEGImages'
xml_path = '../download/VOCdevkit/VOC2012/Annotations'
# For COCO dataset, you need to change dir_root
dir_root = '/mnt/MSCOCO'
I trained some weights for different tasks, you can fetch them here. Put them in folder Pix2SeqV2/weights, so that you don't need to change corresponding configs.
A Small Demo
Before diving into the formal Train&Infer session, let me show a small demo for the multi-task processing.
I just trained the multi-task model weight for 2 epochs in 11 hours, including four tasks(instance segmentation, object detection, image captioning and keypoint detection). So the results are unsurprisingly poor, forgive me =v=. The weight can be download here.
I random choose a picture(No.6471) from COCO validation dataset for visualization.

Next, you can run the following code to get the results of the four tasks.
# mask sure you're in the root directory and set the right weight path(multi_task_weight_path) in CFG
cd infer
python infer_single_image_multi_task.py --image ../images/baseball.jpg > result.txt
After that you can see three images(instance_segmentation.png, keypoint_detection.png, object_detection.png) and a txt file(result.txt) in the infer directory.
result.txt shows all the predictions,
skipping pos_embed...
skipping pos_embed...
<All keys matched successfully>
Captioning:
[['baseball', 'player', 'swinging', 'his', 'bat', 'at', 'home', 'plate', '.']]
[['batter', 'during', 'the', 'game', 'of', 'baseball', 'game', '.']]
[['baseball', 'players', 'are', 'playing', 'baseball', 'in', 'a', 'field', '.']]
Bounding boxes:
[[ 15.665796 134.68234 130.5483 191.906 ]
[262.4021 69.40819 90.07831 232.37599 ]
[ 0. 94.21238 15.665796 53.524773]
[ 96.60574 78.54657 44.38643 61.357697]
[206.26633 223.45518 28.720627 37.859024]
[259.79114 72.01914 75.71802 229.76505 ]
[ 97.911224 180.37425 137.07573 140.99214 ]
[ 0. 95.51784 19.582247 53.52481 ]]
Labels:
['person', 'person', 'person', 'person', 'baseball glove', 'person', 'person', 'person']
Keypoint list:
[[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 176, 125, 198, 117, 168, 145, 237, 157, 0, 0, 261, 167, 180, 184, 205, 183, 173, 208, 204, 210, 0, 0, 0, 0], [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0], [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0], [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0], [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0], [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0], [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0]]
Three images visualize the results of the different visual tasks.
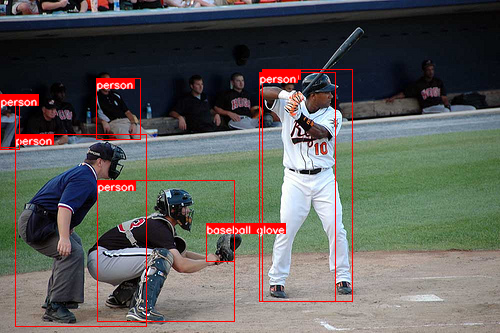


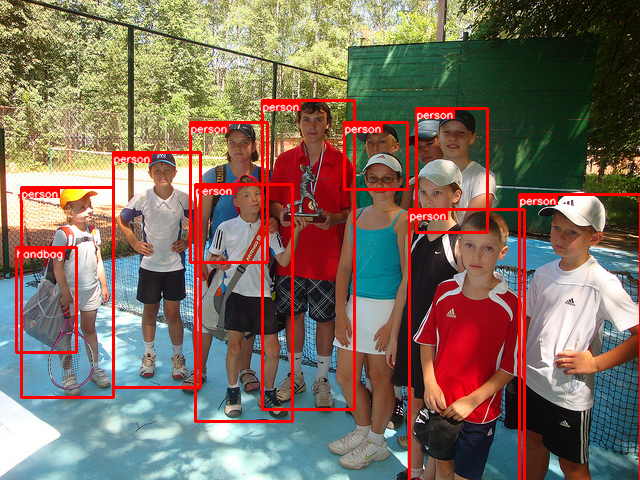
The low recall of object detection task may be due to poor data augmentation and not enough training epochs.
The segmentation task performed OK given the object detection box, as it was given the maximum training weight and I followed the settings of the original paper: repeat the prediction eight times to ensure recall.
The keypoint detection task performed very poorly, I think there are a few reasons for this: firstly it has the lowest weight in the multi-task training; secondly the bounding box I used in data augmentation seems to be too big (twice as big of a detection box, following the original paper's setup), resulting more than one person in the bbox.
Anyway, JJJymmm's pix2seqV2 has taken the first step !!!
Training & Inference
Object Detection

For object detection, you can run the following code to train Pix2Seq from scratch. Hyperparameters such as training epochs, learning rate, etc. can be set in ./config.py. And the weights are saved in the directory ./train.
# mask sure you're in the root directory
cd train
python train_coco_object_detection.py # train on COCO2017
python train_voc_object_detection.py # train on VOC
Once the weights are obtained, you can run the code to infer a single image.
# mask sure you're in the root directory
cd infer
python infer_single_image_object_detection.py --image your_image_path # COCO2017
python infer_single_image_voc.py --image your_image_path # VOC
The predictions(bounding boxes and labels) are printed in terminal and the results of visualization are saved in object_detection.png.
Training and prediction for the other tasks did not differ much from this task.
Instance Segmentation

Code for training.
# mask sure you're in the root directory
cd train
python train_coco_segmentation.py
Code for inference.
# mask sure you're in the root directory
cd infer
python infer_single_image_segmentation.py --image your_image_path --box selected_area(format:xywh)
The results of visualization are saved in instance_segmentation.png.
Image Captioning

Code for training.
# mask sure you're in the root directory
cd dataset
python build_captioning_vocab.py # generate vocab.pkl
# put the vocab.pkl to train folder or set the vocab_path in CFG
cd ../train
python train_coco_img_captioning.py
Code for inference.
# mask sure you're in the root directory
cd infer
python infer_single_image_caption.py --image
The results are printed in terminal.
Keypoint Detection

Code for training.
# mask sure you're in the root directory
cd train
python train_coco_segmentation.py
Code for inference.
# mask sure you're in the root directory
cd infer
python infer_single_image_segmentation.py --image your_image_path --box selected_area(format:xywh)
The results of visualization are saved in keypoint_detection.png.
Multi-Task
Code for training.
# mask sure you're in the root directory
cd train
python train_multi_task.py --task task1,task2,task3...
# supported tasks: detection,keypoint,segmentation,captioning
Code for inference.
# mask sure you're in the root directory
cd infer
python infer_single_image_segmentation.py --image your_image_path --box selected_area(format:xywh)
The text results are printed in terminal and the results of visualization are saved in object_detection.png, keypoint_detection.png, instance_segmentation.png.
Some Results



Cite
- Pix2seq : official implementation(by Tensorflow)
- Pix2seqV1 implementation(by PyTorch)
Pix2seq paper:
@article{chen2021pix2seq,
title={Pix2seq: A language modeling framework for object detection},
author={Chen, Ting and Saxena, Saurabh and Li, Lala and Fleet, David J and Hinton, Geoffrey},
journal={arXiv preprint arXiv:2109.10852},
year={2021}
}
Pix2seq multi-task paper:
@article{chen2022unified,
title={A Unified Sequence Interface for Vision Tasks},
author={Chen, Ting and Saxena, Saurabh and Li, Lala and Lin, Tsung-Yi and Fleet, David J. and Hinton, Geoffrey},
journal={arXiv preprint arXiv:2206.07669},
year={2022}
}
Acknowledgement
坐上那飞机去拉萨(civi粉丝版)